The AV safety review that took 4–6 months now takes a minute.
Telos: conceived, built, and priced by me, solo, from an empty repo
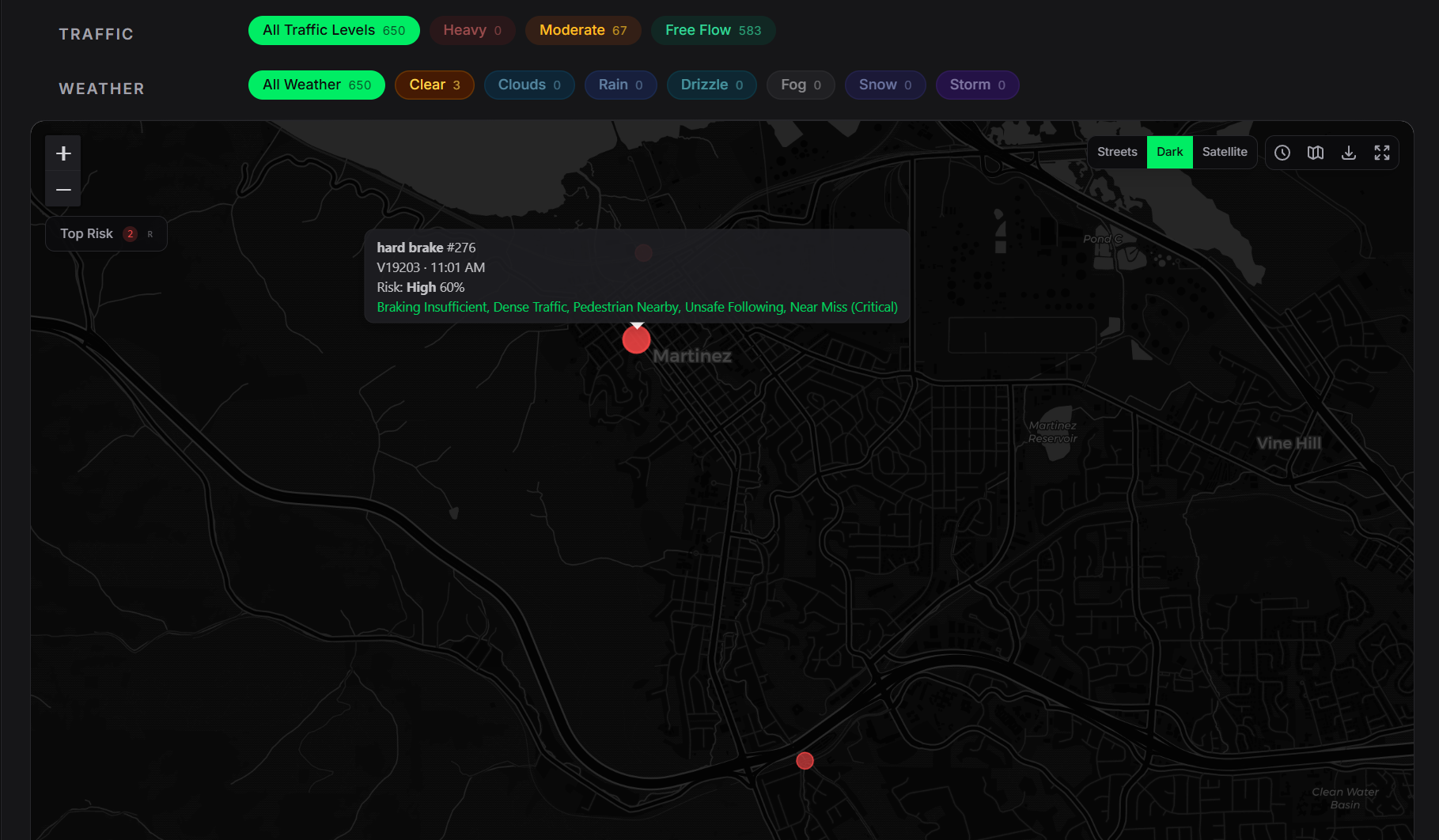
In a working session with the DMV, I saw that the agencies responsible for AVs had no real way to see the edge cases: the moments where autonomous driving goes wrong on real streets. I built Telos to close that gap: every relevant data source fused into one plain-English view, so the people overseeing AVs can see what happened, understand why, and act the same day.
- Delivered to NHTSA and the California DMV to explore and cluster AV safety events, the exact users that DMV session said were flying blind.
- Three cities asked to deploy it after demos to their county transportation authority. They wanted the same risk signal as decision support for their own safety infrastructure, making everyday driving safer, not just AVs. The company has since moved to commercialize it in-house.
- Physics-based risk scoring (time-to-collision, RSS) with a local-LLM narration layer. Cut false alarms 78%, turning a noisy telemetry feed into a decision-grade signal.
- Owned the product end to end: PRD, roadmap, pricing and buyer mapping, KPIs, and the full FastAPI/Next.js implementation.
1 min
To a defensible safety diagnosis
650
Events scored in one deployment
3
Cities asked to deploy after demos
100+
Production PRs, solo, full-stack